The motor and controller thoughts are going around in circles, let's try something else.
Back to the Autopilot ...
This was a lovely thought exercise!
Super enjoyed this! What does it need to do for itself?
Basic "Stuff"
Take off and then land itself. Doesn't sound that hard: power up the motors, hoover a bit, lower the power a bit and gently glide to the ground.
Easy?
Ummm, the
tricky bit is balance!!! Forget the wind for a second, in the real world the motors will not be 100% the same, neither will the propellers (another thing I need to look into) and the drone won't be perfectly balanced.
I can't help, the drone is meant to be autonomous ... will need to balance itself. I'll need cool sensors :)
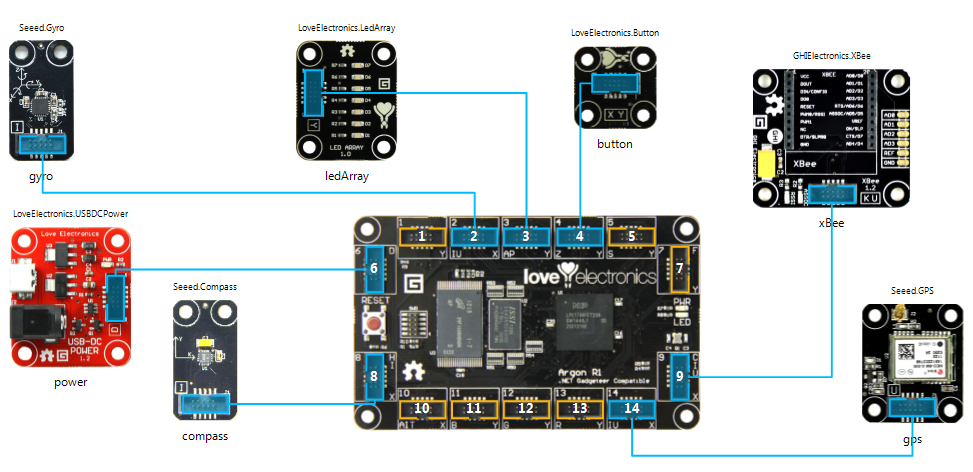
Luckly me, the Gadgeteer platform has
loads of sensors. Gyroscopes, that's the ticket!
I'm wasn't too sure how many I'll need, perhaps four gyroscopes on each of the drone's arms? Perhaps just one gyroscope in the centre is fine ... haha this is the real world :)
I don't really know but that is the fun of this project,
I'll just have to experiment :)
Hovering
Will the GPS sensor be enough to maintain position? Ummm, I hope so, to save my money, ... yet
this is the real world!
We've all seen our phones and sat navs go crazy when the GPS signal isn't great. Normally we cope ... so what sat nav goes crazy, I'm still driving the car.
My problem is that the drone is driving itself ... a old wise computer says, "Rubbish in, rubbish out". How noisy is GPS data?
I need accelerometers! Why? The drone could be completely balanced yet falling. If the GPS data is lost (or bad) then it's crash time!!! Yes, accelerometers seem a good idea :)
How many, who knows? I'm sure someone knows, but it's not me. One in the centre is a good start but perhaps one on each drone's arm, that might help on complex flight ...
ummmm more fun research!!!
Landing
My ideal super-do-per drone will have ultrasonic range finding tech on board and maybe pressure pads on the landing runners :)
I'm just concerned I'm over engineering this from the beginning. When I build this machine, there will be a lot of testing. The R&D phase will be in relatively ideal conditions and landing "should" be OK.
I need to limit the scope, controlled landings in non-ideal conditions is for later. For now, GPS and accelerometers will do! I hope I don't regret that :)
However, ultrasonics for landing is a cool idea :)
Loads of questions are firing in my mind ... I'm going to open another page on this blog just to document them ...
please comment!!